Os robôs conjuntos têm as características de alta flexibilidade, posicionamento preciso e operação estável, por isso são amplamente utilizados no campo da logística automatizada. A introdução de robôs conjuntos promoveu enormemente o desenvolvimento da automação logística, melhorou a eficiência logística e reduziu os custos de mão de obra. A aplicação de robôs articulados na indústria de logística inclui desempilhamento, classificação, carga e descarga, etc. Existem duas soluções para o robô articulado agarrar com precisão a unidade de carga. Uma é a configuração de inicialização artificial, que usa acessórios e outras ferramentas auxiliares para fazer com que a peça sempre alcance a posição designada. O outro é equipado com um sistema de visão, por meio de um posicionamento preciso da visão, para conseguir uma pegada precisa por mãos robóticas. Com o desenvolvimento da ciência e da tecnologia e a complexidade do ambiente de produção, os robôs são obrigados a realizar tarefas com maior precisão e em ambientes mais complexos. Existem muitos tipos de unidades de carga no setor de supermercados e a aparência e aparência das unidades de carga são bastante diferentes. O equipamento de logística existente não consegue obter um posicionamento preciso para diferentes formatos de pilha, diferentes unidades de carga, etc., resultando na impossibilidade de operação do equipamento de automação existente. No momento, a academia e a indústria estão explorando vigorosamente a aplicação da tecnologia de inteligência artificial em diferentes campos, e a tecnologia de visão também é um ponto quente na pesquisa nacional e estrangeira. Nos últimos anos, nas principais conferências e revistas estrangeiras sobre visão computacional, como ECCV e CVPR, novos modelos de rede de “aprendizado profundo” têm sido continuamente propostos. Este projeto constrói uma rede de aprendizagem profunda baseada em ideias de regressão e realiza segmentação de imagem de unidades de carga de supermercado. Ao mesmo tempo, o sistema de visão binocular é combinado para realizar o posicionamento preciso das coordenadas espaciais da unidade de carga.
1. As vantagens do sistema de visão no setor de logística
A solução do sistema de visão é um projeto abrangente, incluindo processamento de imagem, imagem óptica, tecnologia de sensor, software de computador e tecnologia de hardware, etc. Um sistema de aplicação de visão típico inclui captura de imagem, sistema de fonte de luz, módulo de algoritmo de imagem, julgamento inteligente e decisão. módulo de produção e módulo de execução de controle mecânico. O sistema de visão deste projeto combina tecnologia de visão binocular e tecnologia de aprendizado profundo, o que melhora muito a universalidade, precisão e estabilidade do sistema de visão.
1.1 Aplicação da visão binocular
A aplicação da tecnologia de reconhecimento de visão binocular pode obter as informações de distância de objetos no espaço tridimensional de forma mais conveniente e melhorar a eficiência e a precisão da aquisição de informações. A tecnologia de visão binocular evita a dependência de fontes externas de luz especiais e pode obter com precisão as informações de distância do objeto. Além disso, o uso de tecnologia de computador para analisar e processar as informações de distância adquiridas de objetos tridimensionais pode obter melhor informações semânticas mais profundas. A tecnologia visual tradicional deve contar com fontes de luz especiais externas ao adquirir informações e atingir o propósito de compreensão semântica por meio de informações de reflexão de luz. Portanto, a tecnologia de visão tradicional não é universal e não pode compreender com precisão as cenas complexas. Ao mesmo tempo, a tecnologia de visão binocular pode resolver o problema de reconhecimento no espaço tridimensional e expandir muito a gama de aplicações da tecnologia de visão.
O sistema de reconhecimento de visão binocular não requer equipamento em grande escala, e o sistema de reconhecimento consiste apenas em um hardware simples. Portanto, o sistema de visão binocular tem alta flexibilidade e forte escalabilidade. Ao mesmo tempo, as vantagens da tecnologia de computador também podem ser totalmente aplicadas no sistema, melhorando assim a confiabilidade da operação da tecnologia de reconhecimento de visão binocular. A aplicação da tecnologia de reconhecimento de visão binocular pode resolver problemas como a dificuldade em obter informações de robôs tradicionais, melhorar o escopo de aplicação dos robôs e promover o desenvolvimento inteligente de robôs.
1.2 Aplicação de tecnologia de “aprendizado profundo”
“Aprendizado profundo” é um ramo do aprendizado de máquina e um termo geral para uma classe de métodos de reconhecimento de padrões. A estrutura de aprendizado profundo inclui uma estrutura perceptron de várias camadas com várias camadas ocultas. Ao combinar recursos de baixo nível, uma categoria ou característica de atributo de representação de alto nível mais abstrata é formada para obter funções de reconhecimento, julgamento e análise. O sistema de rede neural baseado na operação de convolução é uma direção importante da pesquisa de aprendizado profundo. Este método de pesquisa fez boas pesquisas nas áreas de detecção de falhas, reconhecimento de imagem, reconhecimento de texto (OCR), reconhecimento de rosto, reconhecimento de impressão digital, diagnóstico médico, etc. Resultados. A tecnologia de aprendizado profundo permite que o sistema visual reconheça características de objetos, como o cérebro humano, o que melhora muito a universalidade do sistema visual. Com a ajuda de kits de ferramentas de algoritmo, a tecnologia de visão tradicional pode pré-processar sinais de imagem de maneira rápida e conveniente e obter informações de recursos de imagem. Portanto, a introdução da tecnologia de aprendizado profundo pode resolver com eficácia cenários de aplicação, como diversos tipos de reconhecimento e recursos complexos.
2. Plano de logística
2.1 O processo logístico geral
O armazém de giro do supermercado tem uma grande variedade de unidades de carga, grande rendimento e tempo de resposta rápido.
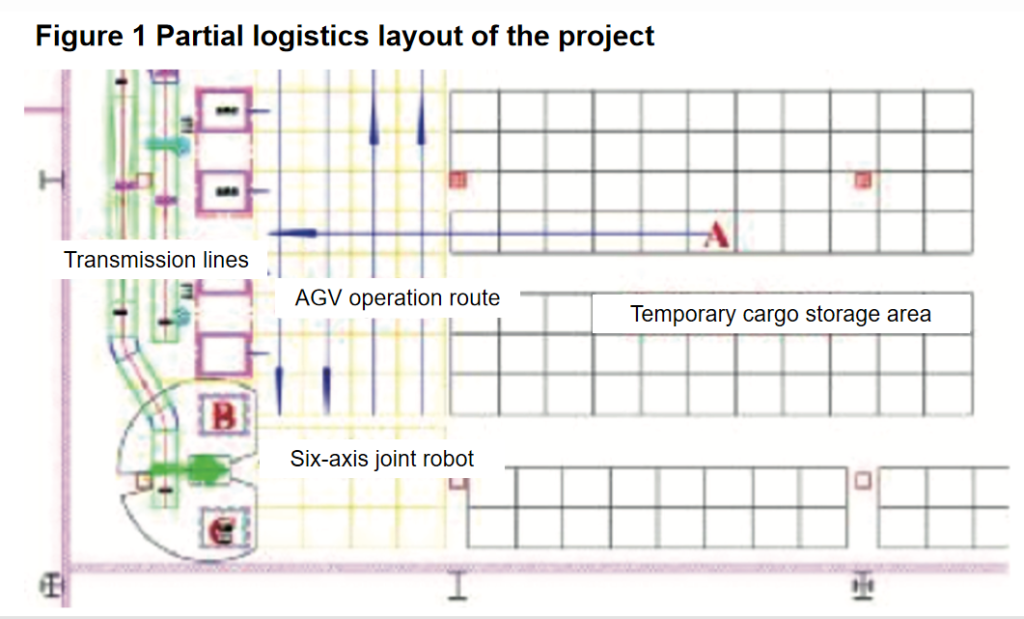
A Figura 1 é um layout logístico parcial do projeto. A função desta parte da linha logística é desempilhar e transportar as unidades de carga armazenadas em cache na área do armazém para a área de saída designada. O processo de operação é o seguinte: o sistema superior emite uma instrução de saída, o AGV recebe a instrução e vai para a área de armazenamento temporário para pegar as mercadorias, e então o AGV transporta a unidade de carga de A para B, e então sai do posto de trabalho; a unidade de carga está posicionada em B Após acionar o sistema de desempilhamento, o sistema de visão começa a identificar e localizar os materiais que chegam e, em seguida, o braço do robô articulado agarra e transporta com precisão as mercadorias para a linha de transporte; finalmente, a unidade de carga segue a linha de transporte até a área de saída designada. Todo o processo de operação não requer intervenção manual e realiza automação total e operação de informação.
2.2 Processo de desempilhamento visual
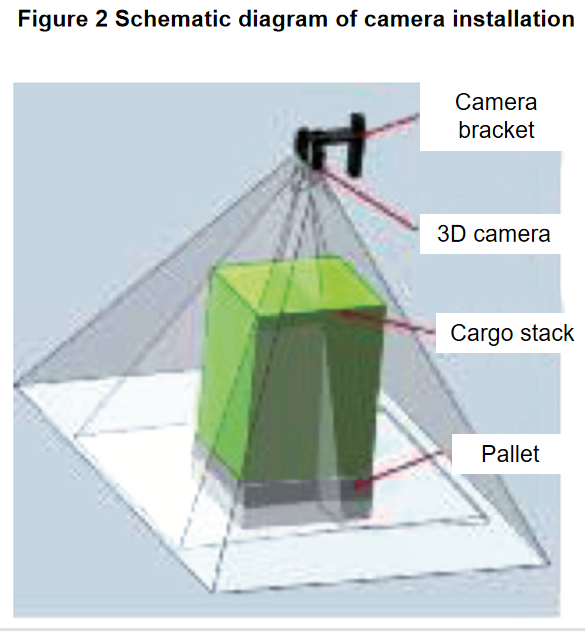
Este projeto utiliza uma câmera de luz binocular estruturada para aquisição de imagens. A câmera é montada no suporte da câmera e o dispositivo de captação não deve entrar no campo de visão da câmera. O tamanho da carga palete é 1000 × 1200 × 1600 (mm). Para garantir o campo de visão da coleta de imagens, o tamanho máximo da câmera da carga do palete não é inferior a 1140 mm. Para garantir a estabilidade e precisão do sistema, a instalação da câmera deve ser firme e confiável, e a vibração causada pelo movimento do robô e do equipamento de logística não deve ter nenhum impacto na câmera. Além disso, a câmera deve estar fora do raio de movimento do robô para garantir que não haja interferência entre a câmera e o robô. O diagrama esquemático da instalação da câmera é mostrado na Figura 2.
O fluxo de dados coletados pelo sistema de visão binocular de luz estruturada usado neste projeto inclui imagens coloridas RGB e dados de nuvem de pontos. A precisão da câmera binocular é de 1 mm @ 1 m (a uma altura de 1 metro, a precisão é de 1 mm). No cenário de operações de desempilhamento em shoppings e supermercados, os dados de nuvem de pontos coletados pelo dispositivo de imagem são ruidosos e é difícil atingir o objetivo de remoção de ruído por meio de um único algoritmo de aprendizado de máquina. Portanto, ao processar dados de nuvem de pontos tridimensionais, é necessário combinar a extração de recursos de imagens bidimensionais para obter a eliminação de ruído de dados de nuvem de pontos. O ambiente da tarefa requer a captura automática e precisa de 1.000 tipos de caixas. A tecnologia de visão tradicional não pode atender aos requisitos de vários tipos de processamento de imagem. Portanto, o projeto estabeleceu um modelo de rede neural para segmentação de imagens baseado em um modelo de aprendizado profundo. Este modelo pode segmentar a caixa na imagem para obter uma máscara independente para cada caixa. O mapeamento da máscara obtida pela segmentação da instância para os dados da nuvem de pontos pode remover os pontos de ruído nos dados da nuvem de pontos. Depois de obter os dados de nuvem de ponto de eliminação de ruído de cada caixa, a coordenada central de cada caixa pode ser calculada através do algoritmo de aprendizado de máquina e, finalmente, a posição da coordenada central é alimentada de volta para o PLC do robô para obter um posicionamento preciso.
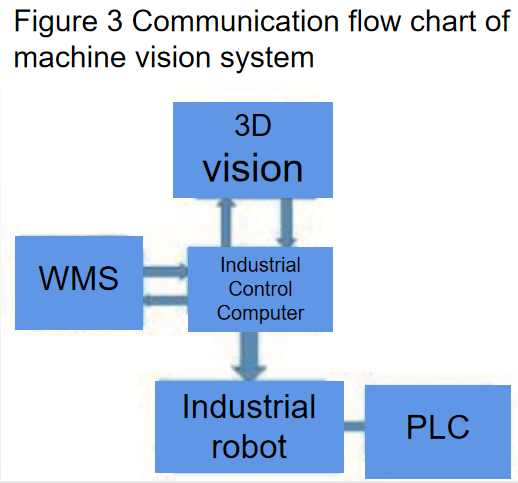
O sistema de visão binocular coopera com o robô para realizar o processo de operação de desempilhamento automático: quando o sistema está no lugar, o sistema superior envia instruções ao sistema de visão, e o sistema de visão é acionado para iniciar a coleta de imagens. O sistema de visão binocular reconhece automaticamente a forma da pilha e calcula as informações de posição espacial do alvo e as envia para o robô. O robô pega a caixa do alvo de acordo com a informação de posição recebida do alvo, e então o sistema de visão binocular realiza a coleta de imagens e o cálculo de dados novamente. O robô se move acima da linha de transporte e coloca a caixa de papelão na linha de transporte. O robô retorna ao topo da pilha e pega a caixa de papelão de acordo com as instruções do sistema de visão. O sistema executa continuamente as etapas acima até que a tarefa seja concluída. O fluxograma do sistema de visão de máquina é mostrado na Figura 3.
3 Resumo
A operação bem-sucedida do sistema de despaletização de robô conjunto guiado por visão realizou a função de despaletização automática de vários tipos de produtos na indústria de supermercados, promoveu o desenvolvimento da indústria de logística de indústrias intensivas em mão de obra para indústrias intensivas em tecnologia e promoveu o desenvolvimento inteligente de robôs de logística. A eficiência do trabalho e a qualidade dos robôs de logística são melhoradas e os custos de mão de obra são bastante reduzidos. Além disso, o sucesso do projeto também fornece um melhor cenário de aplicação para tecnologias de inteligência artificial avançadas, como aprendizado profundo, e expande o escopo de aplicação de tecnologias de inteligência artificial.